Diagrama de Bloques de Funciones (FBD) – un lenguaje de diagramas de bloques secuenciales;
Un lenguaje de programación es un lenguaje formal diseñado para expresar procesos que pueden ser llevados a cabo por máquinas como puede ser un ordenador. En el caso de los PLCs, los lenguajes de programación para los surgieron junto al mismo tiempo que la aparición del primer PLC, en 1968. Así se explica porque no se utilizaron para este fin lenguajes de programación de alto nivel como Pascal y C y, en su lugar, se emplearon otros lenguajes más simples y fáciles de entender, como podremos ver a continuación.
Fue la tercera parte del estándar IEC 61131, el que consideró estos lenguajes para la programación de los PLCs.
De este modo se definieron los siguientes cinco lenguajes:
• Diagrama de Funciones Secuenciales (SFC) – un lenguaje de bloques de funciones secuenciales;
• Diagrama de Bloques de Funciones (FBD) – un lenguaje de diagramas de bloques secuenciales;
• Diagramas de Tipo Escalera (LАD) – un lenguaje de diagramas de relés (denominado de tipo escalera);
• Texto Estructurado (ST) – un lenguaje de alto nivel como el del tipo de texto estructurado (similar a C y, sobre todo a Pascal);
• Lista de instrucciones (IL o STL) – lenguaje de tipo ensamblador con uso de acumuladores.
En resumen, los lenguajes de programación para PLC son de dos tipos, visuales y escritos. Los visuales (SFC, FBD y LAD) admiten estructurar el programa por medio de símbolos gráficos, similares a los que se han venido utilizando para describir los sistemas de automatización, planos esquemáticos y diagramas de bloques. Sin embargo, los escritos (ST e IL o STL) son listados de sentencias que describen las funciones a ejecutar. Los programadores de PLC poseen formación en múltiples disciplinas y esto determina que exista diversidad de lenguajes. Los programadores de aplicaciones familiarizados con el área industrial prefieren lenguajes visuales, por su parte quienes tienen formación en electrónica e informática optan, inicialmente por los lenguajes escritos.
A continuación se expondrán las características y funciones más básicas de este tipo de lenguajes así como un extracto representativo de cada uno de ellos.
• Diagrama de Bloques de Funciones (FBD) –
El diagrama de funciones mostrado en la Figura 2-3, es un lenguaje gráfico en el cual se utilizan símbolos lógicos para representar los bloques de función. Éste es un lenguaje que se le facilita a las personas familiarizadas con los circuitos electrónicos.
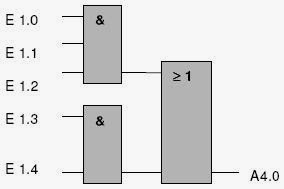
Figura 2-3 Diagrama de bloques de Funciones (FBD)
FBD en LOGO de SIEMENS - Ejemplo:
LOGO! utiliza para programar su funcionamiento, un lenguaje denominado "FBD", Function Block Diagram. En español lo denominamos: "Diagrama de bloques de función".
Esta programación se puede realizar de 2 maneras:
-Con el display y teclas que posee el frente del equipo.
-Con el software LOGO!soft instalado en una computadora personal.
Les explicaré brevemente y en forma esquemática, como debe entenderse este lenguaje. Es necesario poseer conocimientos de electricidad industrial y circuitos simples de comando eléctrico.
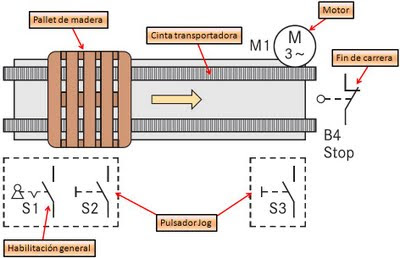
Para avanzar en la explicación, lo haré con un pequeño ejemplo práctico. A continuación imaginamos una cinta transportadora de pallets, motorizada con el mando M1.
Éste mecanismo es operado por 2 botoneras (S2 y S3) ubicadas en los extremos del transporte, el operador encenderá el motor oprimiendo el botón, al soltarlo, se detendrá.
También consideramos la instalación de un fin de carrera B4, que se activa con el pallet en su posición final.
Por último una habilitación principal, que denominamos S1, y es condición necesaria para el funcionamiento de los pulsadores.
Observen a continuación, un esquema con todos los elementos detallados:
El circuito eléctrico de mando (como mínimo), sería el que muestro a continuación:
El solenoide Q1 nos permite accionar el contactor que conecta el motor a la red trifásica. Notarán que faltan algunos elementos habituales en este tipo de instalaciones, pero sabrán entender que sólo es a modo de ejemplo.
Ahora ustedes con LOGO! facilitan la tarea de cableado del comando del contactor. Lo realizaremos de la siguiente manera:
Por lo general el cableado de un autómata siempre es mucho mas sencillo. Los contactos NA y NC de las botoneras y fines de carrera se deben conectar a cada una de las entradas digitales (I1; I2; I3....). En tanto el solenoide se conectará en serie con el contacto NA que posee la salida digital Q1. De la misma manera conectaremos las otras salidas, si fuera necesario (Q2; Q3;...)
Ahora que hemos reemplazado un circuito 100% eléctrico, por un equipo electrónico programable, debemos analizar cuales serían los equivalentes.
Para ésto, he agrupado las condiciones que están en "paralelo"...
Loscontactos S2 y S3 conectados en "paralelo", tienen su equivalente en el bloque de función "OR" que recibe en sus entradas el estado de los pulsadores jog.
Las condiciones que están conectadas en "serie", son S1 (conjunto S2-S3) y B4...
Para interconectar condiciones en serie, usamos el bloque de función "AND", el cuál en sus entradas recibe las señales de S1 y B4. También deberá recibir el resultado del bloque de función "OR" que configuramos en el paso anterior.
El resultado del bloque "AND" será el que finalmente active la salida Q1, es decir, el contactor del motor M1.
Por lo tanto, obtenemos un "Diagrama de Bloques de Función" equivalente al circuito de comando.
Éste FBD cumple y se comporta exactamente igual al planteado originalmente. El diagrama a cargar en LOGO! es el siguiente:
Consideremos que:
Habilitación general S1 => I1
Pulsador mando jog S2 => I2
Pulsador mando jog S3 => I3
Fin carrera seguridad B4 => I4
Contactor motor M1=>Q1
Más información:
AUTOMATISMOS - Listado de instrucciones en AWL. Para Autómatas Programables ...
AUTOMATISMOS - Listado de software de simulación de Autómatas Programables (PLCs) ...
AUTOMATISMOS - Simulador de PLC de Siemens
INF.TECN: Cadesimu v.3.0 Introducción y enlaces ...
Fuente: Wikipedia + logicaycontrol.blogspot +